AVR マイコン + シフトレジスタで7セグメントLEDを制御したい
知識材料
- [ATTiny85]
- [SN74HC595]
利用環境
- [Arduino IDE 1.8.7]
今回のゴール
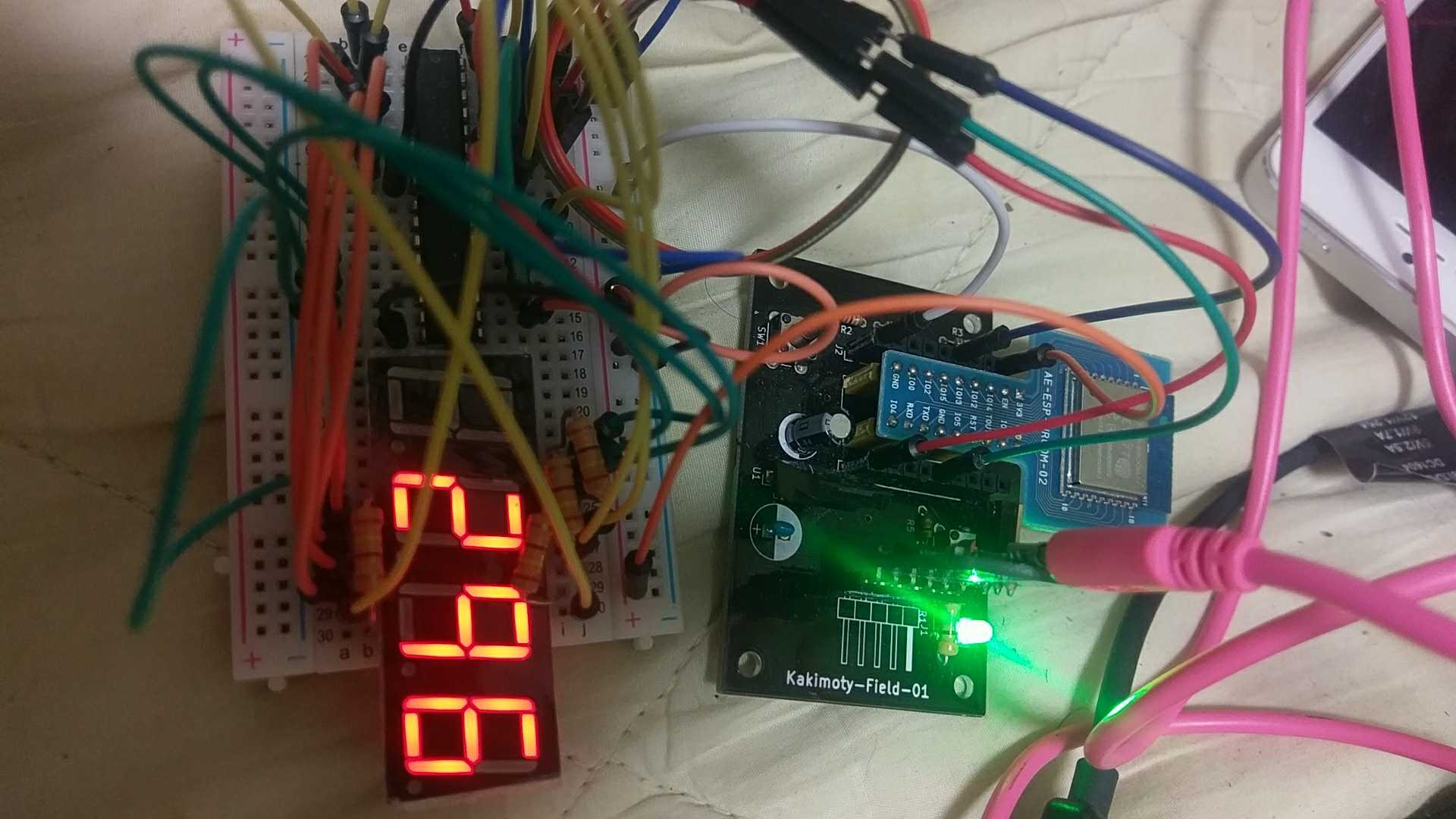
7セグメントLEDを制御する回路と、プログラムを作成する。 作成した回路は外部からのデータ入力で、LEDの表示を変えることができるようにする
実践
回路作成

Arduino 側ソースコード
#define UART_Tx 3
#define UART_Rx 1
#include <avr/io.h>
#include <SoftwareSerial.h>
#include <stdlib.h>
SoftwareSerial mySerial(UART_Rx, UART_Tx); // RX, TX
int SEG_7[] = {0x7E, 0x12, 0xBC, 0xB6, 0xD2,
0xE6, 0xEE, 0x32, 0xFE, 0xF2, 0x00};
// H2
// H4 H1
// H8
// L8 L2
// L4 L1 H8421 L8421
void Show7Seg(int val)
{
Show7Seg2(val, true);
}
void Show7Seg2(int val, bool zeroSup)
{
for(int i = 1; i <= 4; i++ )
{
int writeVal = val % 10;
val /= 10;
if( zeroSup && (val == 0 && writeVal == 0 ) && i != 1)
writeVal = 10;
__Show7SegWithDigit( writeVal , i);
}
}
void __Show7SegWithDigit(int val, int dig)
{
// Reset();
// Send_Byte(0xFF, false); // 非表示
// Send_Byte(0x00); // 数字なし
switch(dig)
{
case 1:
Send_Byte(0xFE, false);
break;
case 2:
Send_Byte(0xFD, false);
break;
case 3:
Send_Byte(0xFB, false);
break;
case 4:
Send_Byte(0xF7, false);
break;
default:
Send_Byte(0xF0, false);
break;
}
Send_Byte(SEG_7[val]);
delayMicroseconds(100);
}
///
/// Shift Register
int PIN_SER = 0;
int PIN_SRCLK = 4;
int PIN_RCLK = 2;
void Shift()
{
digitalWrite(PIN_SRCLK, HIGH);
delayMicroseconds(1);
// delay(1);
digitalWrite(PIN_SRCLK, LOW);
}
void Regist()
{
digitalWrite(PIN_RCLK, HIGH);
delayMicroseconds(1);
// delay(1);
digitalWrite(PIN_RCLK, LOW);
}
void Reset()
{
/*
digitalWrite(PIN_SER, LOW);
digitalWrite(PIN_SRCLK, LOW);
digitalWrite(PIN_RCLK, LOW);
*/
PORTB &= ~(_BV(PIN_SER) | _BV(PIN_SRCLK) | _BV(PIN_RCLK));
}
void Send_Byte(int bits)
{
Send_Byte(bits, true);
}
void Send_Byte(int bits, bool autoRegist)
{
for( int i = 0; i < 8; i++ )
{
if( (( 1 << i) & bits) == 0 )
{
// digitalWrite(PIN_SER, LOW);
PORTB &= ~_BV(PIN_SER);
}
else
{
// digitalWrite(PIN_SER, HIGH);
PORTB |= _BV(PIN_SER);
}
Shift();
}
if( autoRegist )
Regist();
}
///
/// timer
unsigned long interval = 100;
unsigned long prevMill = 0;
bool onTime()
{
bool ret = false;
unsigned long currentMill = millis();
if( currentMill - prevMill >= interval )
{
prevMill = currentMill;
ret = true;
}
return ret;
}
int numnum = 8888;
/*
bool b_rxRead = false;
void onSerial()
{
// char c = RxByte();
// TxByte(c);
// detachInterrupt(0);
// numnum = 0;
b_rxRead = true;
}
*/
void setup() {
// put your setup code here, to run once:
pinMode(PIN_SER, OUTPUT);
pinMode(PIN_SRCLK, OUTPUT);
pinMode(PIN_RCLK, OUTPUT);
// attachInterrupt(0, onSerial, RISING);
// b_rxRead = true;
mySerial.begin(38400);
Reset();
outputTest();
}
char serialBuf[16];
int serialCount = 0;
///
/// Main Loop
void loop() {
// put your main code here, to run repeatedly:
//if(mySerial.available())
{
char t = mySerial.read();
if( t != -1 )
{
if ( t == 0x0d ||
t == 0x0a ||
serialCount == 14)
{
if( serialCount != 0 )
{
serialBuf[serialCount] = 0x00;
int num = atoi(serialBuf);
serialCount = 0;
numnum = num;
}
} else {
serialBuf[serialCount++] = t;
}
}
}
Show7Seg(numnum);
}
実行と結果
まとめ
ダイナミック表示がチラつくことがあるので、改修が必要かと思われます。
シリアルからのデータ受信が、数値ではないなど不正だった場合のようなエラー処理が未熟なので、そのへんももう少し考えたい